由纳米磁铁编程的微型机器人
2019年11月08日 由 KING 发表
43257
0
在科幻电影中,机器人通常是由刚性材料制成的人型的或更大的机器。然而,在过去的几年中,由柔软材料制成或具有柔性结构的机器人引起了人们的兴趣,因为它们具有比刚性机器人更安全地与人互动的潜力。这些机器人提供动力的方法多种多样,但是想要在狭窄的空间中进行无线操作,利用磁场是最安全有效的手段。研究人员发表在《自然》杂志的论文中介绍了制造微米级机器人的关键步骤,该机器人可以在施加磁场的环境中快速变换为不同的形状。
世界上最早的有关地球磁场的描述出现在我国古代著作《鬼谷子》和《韩非子》中名为矿岩的矿物质,后来它被用于制造早期的磁罗盘。过去几年,在磁性软机器人使用了类似的原理,将大小不同(纳米到毫米)的磁体集成到柔性结构或软材料中。在磁体外部施加的磁场能够改变机器人的形状。这种致动机制在设计机器人的结构、磁化模式和强度以及何时何地施加磁场来控制机器人时具有很大的灵活性。另外,由于可以精确地计算出由外部磁场施加在磁体上的力和扭矩,因此已经开发出模型来定量描述特定机器人设计的致动。 磁性软机器人已被开发用于多种用途,尤其是在生物医学应用中。它们与人体紧密相互作用。例如,自折叠的“折纸”机器人可以爬过肠道,修补伤口并吞咽物体。已经制造了沿着胃的内表面滚动并且可以进行活组织检查和递送药物的胶囊形机器人。可被磁场操纵的机器人导管也已经开发出来,它可以对心脏进行微创手术或检查肺呼吸道。而且已经制造出了更细的,类似螺纹的机器人,可以潜在地操纵大脑血管来治疗中风或动脉瘤。这些机器人的长度从数百微米到几厘米不等。
磁性软机器人已被开发用于多种用途,尤其是在生物医学应用中。它们与人体紧密相互作用。例如,自折叠的“折纸”机器人可以爬过肠道,修补伤口并吞咽物体。已经制造了沿着胃的内表面滚动并且可以进行活组织检查和递送药物的胶囊形机器人。可被磁场操纵的机器人导管也已经开发出来,它可以对心脏进行微创手术或检查肺呼吸道。而且已经制造出了更细的,类似螺纹的机器人,可以潜在地操纵大脑血管来治疗中风或动脉瘤。这些机器人的长度从数百微米到几厘米不等。
磁性软机器人的进一步小型化可以实现新的应用,例如在最小的血管中执行操作,但是制造这种微型机器提出了更大的挑战。对于小的磁软机器人结构,现有方法已包括磁性元件的直接组件,颗粒填充聚合物片的磁化和包含排列的磁性粒子软的复合材料的印刷。研究人员现在通过使用一种称为电子束光刻的技术来制造仅几微米尺度的可磁重构机器人,从而进一步突破了技术界限。更具体地说,该技术使他们能够在薄而柔软的氮化硅面板中制备纳米级钴磁铁阵列。 钴纳米磁铁在暴露于外部磁场后可以保留其磁性。这种行为称为磁滞现象,部分是由纳米磁铁的形状引起的。因此,研究人员可以调整纳米磁体的磁性和磁滞行为,从而使较薄的纳米磁体比较厚的纳米磁体更难磁化。换句话说,需要更强的磁场来磁化更薄的纳米磁体。反过来,这意味着使用相对较弱的磁场更容易对较厚的磁体进行重新磁化,以“覆盖”其磁化强度和方向。
钴纳米磁铁在暴露于外部磁场后可以保留其磁性。这种行为称为磁滞现象,部分是由纳米磁铁的形状引起的。因此,研究人员可以调整纳米磁体的磁性和磁滞行为,从而使较薄的纳米磁体比较厚的纳米磁体更难磁化。换句话说,需要更强的磁场来磁化更薄的纳米磁体。反过来,这意味着使用相对较弱的磁场更容易对较厚的磁体进行重新磁化,以“覆盖”其磁化强度和方向。
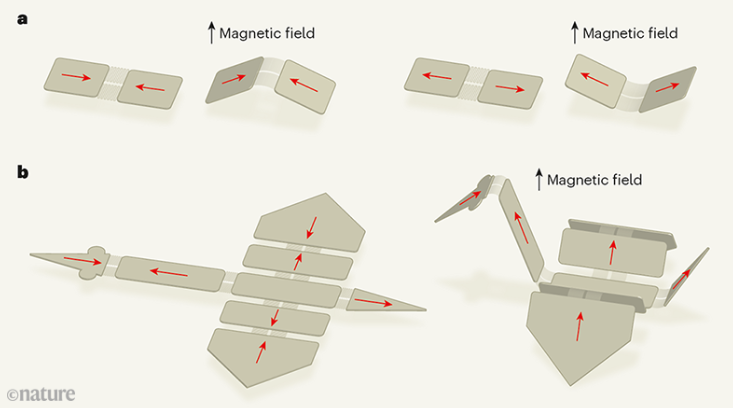
因此,研究人员可以有选择地调整纳米磁铁的磁化强度,从而使激活磁场(比起初使它们磁化的磁场弱得多)导致的面板以不同的方式折叠。由此产生的多面板组件因此被“编程”为在激励磁场中变形为特定配置。这些组件可以依次组装以产生复杂的形状(例如字母),甚至可以制造出微观的“鸟”,从而产生诸如在整个表面上转动,拍打和滑动的动作。
为了实现生物医学应用的磁性软机器人的全部潜能,仍需进行大量工作。必须使用定量模型来设计它们,以在相对弱的磁场中优化其特定任务的性能,即找出哪些需要进行重新配置,机器人在其环境上必须施加的力的大小以及速度。还需要用于对人体深处的机器人进行实时成像和定位的方法,尤其是在狭窄的空间中,并且不得干扰磁致动机制。
 人工智能可能会进一步发展,以协助图像分析和机器人控制。最后,一旦机器人执行了任务,就需要安全恢复或降级机器人的方法。没有毒性或其他不利影响的降解是特别希望的。
人工智能可能会进一步发展,以协助图像分析和机器人控制。最后,一旦机器人执行了任务,就需要安全恢复或降级机器人的方法。没有毒性或其他不利影响的降解是特别希望的。
磁性软机器人还被广泛研究用于生物医学以外的应用,例如柔性电子,可重构表面和活性超材料(工程材料由局部吸收能量的子单元组成,然后转化为可产生大规模动态运动的运动)。因此,正在开发用于设计,制造,成像和控制各种长度范围的磁性软机器人的平行平台。此项工作为磁性软机器人这一领域的发展奠定了基础。