












请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






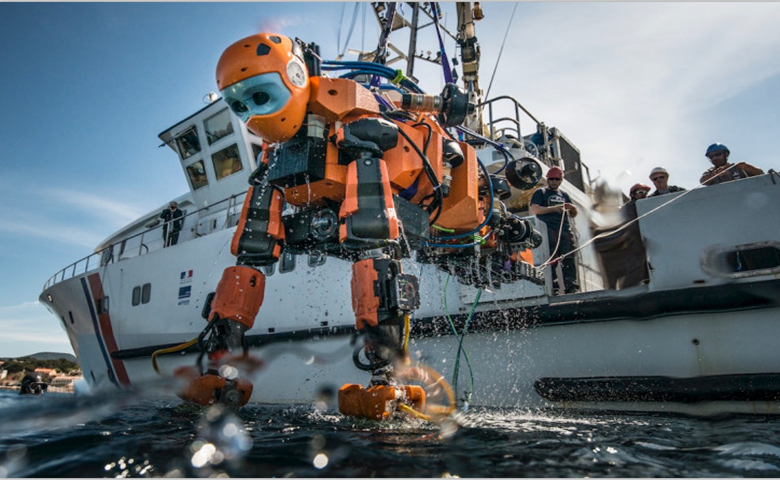
深海探测机器人——“海洋一号”成功出航!
2017年07月10日 由 nanan 发表
298656
0

全球人工智能与机器人峰会 — CCF-GAIR大会,于2017年7月7日至9日,在深圳隆重召开。并且在8日下午,斯坦福大学机器人实验室教授、国际机器人研究基金会主席Oussama Khatib教授进行了一场主题为“深海探索,海洋一号”的大会演讲。本次大会的参会人数高达3000人之多,聚集了全球30多位顶级院士、近300家AI明星人工智能企业参加,都是国家的高端阵容,真可谓是声势浩大。CCF-GAIR大会由CCF中国计算机学会主办、雷锋网与香港科技大学(深圳)承办。
Oussama Khatib教授讲解的第一件事是机器人的触觉反馈系统。
由于人类能承受的压力比较小,所以最多只能潜几十米的深度,往往为了潜入较深的水中,潜水员需要穿上防压服才可以,甚至是需要在水下仓中呆上几个月的时间都是有可能的。但这个问题目前得到解决了,因为有了“海洋一号”,几十米、几百米、几千米,甚至到了可以触碰到海床的深度,都是可行的。比如在2016年的时候Oussama教授团队研发的“海洋一号”机器人就从地中海91米深的沉船里,成功打捞起350年前的一件文物。据了解,最近“海洋一号”也从另一个地点成功打捞起了另一件物品。

为了能成功的控制“海洋一号”机器人,Oussama教授团队研发了一套通过触觉反馈的神经系统,可以让下水的机器人更好的操作,而机器人的一些发现也可以快速的反馈给操作的人。
除了触觉反馈系统,Oussama教授团队还研发了一个模拟系统,早在机器人的硬件开始建造之前就可以对机器人的触觉反馈系统进行测试,并且可以进行一些任务的整体测试操作。
“海洋一号”机器人的作用是有很多种的,除了可以打捞文物之外,还可以进行珊瑚保护工作和水下维修的工作。类似这样的平台操作,其实还有很多,比如代替人类去完成一些危险任务的操作
Oussama教授在会上还演示了一些触觉机器人可以触觉与实际事物接触并进行互动的一些例子,不仅是实用性很高,而且还不需要对机器人的动作进行精确的编辑操作。

现今的机器人已经具有一定的活动性,但是机器人与现实世界的接触交流还有很大的成长空间,Oussama教授则认为,目前为止不能指望我们把所有的功能都放到机器人当中去,这样不科学,所以更重要的是,要让机器人具有触觉反馈的功能才可以,这样不仅可以给机器人带来更多的功能应用,使机器人像人类一样进行学习,还可以使人类与机器人的合作更加的顺畅,不需要去对机器人的功能进行完整的编辑。

Oussama Khatib教授讲解的第二件事是如何让机器人学会像人类一样进行动作的控制。例如在人类的引导下进行动作、与人类跳舞或者是可以躲开人类对它做出的“伤害性”的动作等。
其实在机器人执行任务的过程当中,需要有自我感觉、姿势控制等,才能更好的控制机器人,使机器人的动作更流畅、更协调。在会上Oussama Khatib教授演示了一个多点接触的机器人,可以同时与多个面解除并还保持平衡的示例。
“海洋一号”在有了以上各种各样技术的支持下,就可以很好的完成人类给予的各种任务,并在正式执行任务之前,“海洋一号”不仅在地中海15米深的海域与人类潜水员一起进行了下潜的任务,而且已经测试过好几个月了,各项操作指标都达到人类指定的目标。
曾经在执行任务过程中,还出现过一次有惊无险的经历,由于水下清晰度不够,“海洋一号”卡在水底无法出来,由于是在100米深的海域中,潜水员也无法下去解救,当时所有人几乎都任务这次任务失败了,但好在机器人具有强大的前肢能力,成功解救出自己了,最终这次任务还是圆满的完成了。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com

广告







广告
写评论取消
回复取消