MIT制造出能够像植物一样生长的机器人
2019年11月10日 由 KING 发表
966272
0
在当今的工厂和仓库中,经常能够看到机器人在四处乱窜,将物品或工具从一个站点运送到另一个站点。在大多数情况下,机器人可以在各种路线中轻松导航。但是想要他们在狭窄的空间中来拿取物品,或在汽车的发动机上拧开油盖之类的任务是不可能的。
现在,麻省理工学院的工程师已经开发出一种机器人,该机器人的设计目的是使链状附件延伸得足够灵活,以使其能够扭曲和转动其必要的配置,同时又具有足够的刚性以支撑重负载或施加扭矩,从而在狭窄的空间中组装零件。任务完成后,机器人可以收回附件,并以不同的长度和形状再次将其伸出以完成下一个任务。
附件的设计灵感来自于植物的生长方式,其中涉及以流化形式将营养物输送到植物的顶端。在那里,它们被转化为固体材料,以一点一点地产生支撑茎。同样,机器人由一个“生长点”和变速箱组成,该变速箱将松动的互锁块链拉入盒子。然后,盒子中的齿轮将链条单元锁定在一起,并以刚性附件的形式逐个将链条送出。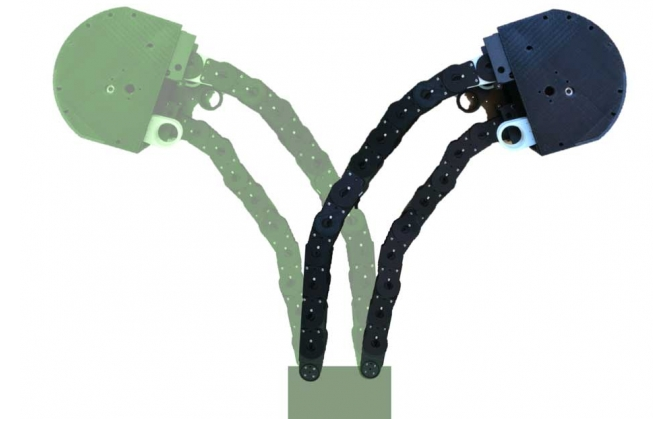 研究人员在本周于澳门举行的IEEE国际智能机器人与系统国际会议(IROS)上展示了以植物为灵感的“生长机器人”。他们设想可以将抓取器、摄像头和其他传感装置安装到机器人的变速箱上,从而使其能够穿过扭曲的空间来完成任务。
研究人员在本周于澳门举行的IEEE国际智能机器人与系统国际会议(IROS)上展示了以植物为灵感的“生长机器人”。他们设想可以将抓取器、摄像头和其他传感装置安装到机器人的变速箱上,从而使其能够穿过扭曲的空间来完成任务。
麻省理工学院机械工程学教授哈里·Asada(Harry Asada)说:“以更换车内的机油为例。打开发动机顶盖后,机械臂必须足够灵活以便左右转弯才能到达机油滤清器,然后必须足够坚固以扭转机油滤清器盖以将其卸下。现在我们有了一个可以潜在地完成这些任务的机器人,它可以生长,收缩和再次生长为不同的形状,以适应不同的任务。”
最后一脚
新机器人的设计是Asada解决“最后一只脚问题”工作的一个分支,“最后一只脚问题”是指机器人和其探索性任务的最后一步。虽然机器人可能会花费大部分时间穿越开放空间,但其任务的最后一步可能需要在更紧凑、更复杂的空间中进行更灵活的导航以完成任务。
工程师已经设计出各种概念和原型来解决“最后一只脚问题”,包括由柔软的气球状材料制成的机器人,这种材料像藤蔓一样生长,可以通过狭窄的缝隙挤压。但是Asada表示,这种柔软的可扩展机器人不够坚固,无法支撑“末端执行器”或执行任务所需的附加组件,例如抓取器,照相机和其他传感器。我们的解决方案实际上不是利用软性材料,而是巧妙地使用了刚性材料。”
链环
一旦团队确定了植物生长的一般功能要素,他们便希望在可扩展的机器人中模仿一般意义上的植物生长。
Asada说:“这个机器人与实际工厂的机器人完全不同,但是它在某种抽象水平上展现出相同的功能。”
研究人员设计了一个变速箱来代表机器人的“生长尖端”,就像植物的茎一样,随着更多的营养素流向该部位,尖端将产生更坚硬的茎。在盒子中,它们装有齿轮和电动机系统,该系统用于拉起软性材料,在这种情况下,弯曲的3D打印塑料单元序列相互连锁,类似于自行车链条。
当链条被送入盒子时,它绕绞盘转动,绞车通过第二组电机进行编程,该第二组电动机被编程为将链条中的某些单元锁定到其相邻单元,从而在将其从盒子中送出时形成刚性附件。
研究人员可以对机器人进行编程,以将某些单元锁定在一起,而其他单元则保持解锁状态,以形成特定的形状,或在某些方向“生长”。在实验中,他们能够对机器人进行编程,以使其绕着障碍物从其基座延伸或扩展时转过身。
[video width="1280" height="720" mp4="https://www.atyun.com/uploadfile/2019/11/Growing-Robot.mp4"][/video]
当链条被锁定并且是刚性的时,它的强度足以支撑一磅重的物体。研究人员说,如果将抓取器连接到机器人不断增长的尖端或变速箱上,则该机器人可能会长得足够长,以在狭窄的空间内蜿蜒而行,然后施加足够的扭矩来松开螺栓或松开盖子。
研究人员说,自动维护是机器人可以完成的任务中一个很好的例子。引擎盖下的空间相对开放,但最后一步,你必须在发动机缸体周围导航或到达机油滤清器的地方,固定的机械臂无法在周围导航,但这个机器人却可以。”





























