











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






谷歌使用AI教机器人如何精准抓握并投掷物品
2019年03月27日 由 冯鸥 发表
158453
0
对物理定律能直观理解的机器人可能听起来像阿西莫夫小说里的设想,但谷歌机器人部门的科学家们表示,他们基本上已经创造了这样的机器人。他们认为,在这样做的过程中,他们可能为未来开发能学习投掷,滑动,旋转,摆动,捕捉和其他运动技能的系统奠定基础,这些技能对于目前功能最强大的机器来说也是极大的挑战。
谷歌研究员Andy Zeng表示,“尽管在使机器人有效掌握物体,视觉上自我适应甚至从实际经验中学习方面取得了相当大的进步,机器人操作仍需要仔细考虑如何拾取,处理和放置各种物体,尤其是在非结构化设置中,但是机器人能不能不只被动接受动力学,而是学会有效使用它们,开发一种物理学的直觉,使他们能够更有效地完成任务?”
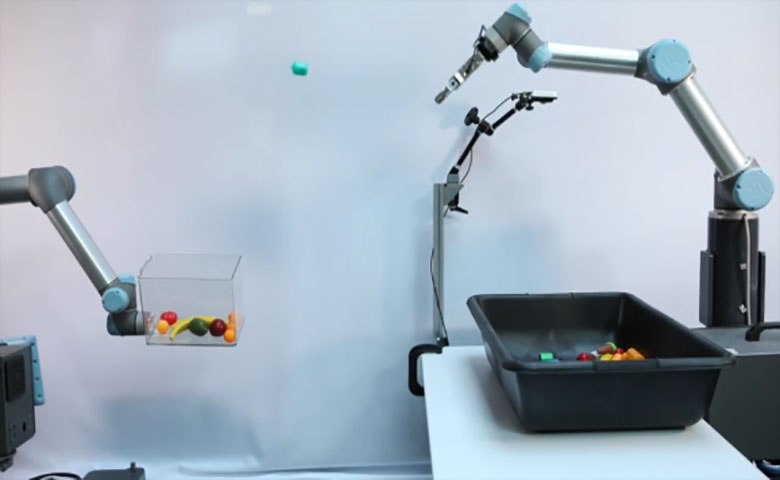
为了回答这个问题,Zeng等人与普林斯顿,哥伦比亚和麻省理工学院的研究人员合作开发了一个名为TossBot的拾取机器人,该机器人学会抓住并将物体扔到其自然范围之外的盒子里。它不仅比以前的最先进的模型快一倍,而且达到了两倍的有效放置范围,而且可以通过自我监督来提高。
即使对人类来说,可预测性的投掷也不容易。抓地力、姿态、质量、空气阻力、摩擦力、空气动力学等变量会影响物体轨迹。通过反复试验建立弹丸物理模型在一定程度上是可能的,但Zeng指出,这在计算上成本非常高,需要花费大量时间。
相反,TossingBot使用弹道模型来估计将物体送到目标位置所需的速度,并使用端对端神经网络通过对头顶摄像机的视觉和深度数据进行训练,在此基础上预测调整。Zeng表示,这种混合方法使系统的投掷准确率达到85%。
教TossingBot抓住物体有点棘手。它首先反复尝试糟糕的抓取动作,直到它找到更好的方法,同时通过偶尔随机投掷物体以及以前没有尝试过的速度来提高其投掷能力。经过大约14个小时的1万次抓握和投掷尝试后,TossingBot牢牢抓住在杂乱物品中的物体概率为87%。
更令人印象深刻的是,经过一两个小时的训练,TossingBot可以适应从未见过的地点和物体,如装饰物品和办公物品,“TossingBot可能学会更多地依赖几何线索(如形状)来学习抓握和投掷,这些新出现的特性是在任务级抓取和投掷之外,在没有任何明确监督的情况下,从无到有进行内隐学习的。然而,它们似乎足以使系统能够区分对象类别,如乒乓球和记号笔。”
但团队尚未使用脆弱的物体对TossingBot进行测试,或者使用严格的可视化数据作为输入,这可能会阻碍其在测试中对新对象做出反应的能力。但他们表示,物理学和深度学习相结合的基本理念是未来工作的一个有前景的方向。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消