











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






加州大学伯克利分校研究团队训练机器人抓握对抗性物体
2019年07月10日 由 冯鸥 发表
713623
0
 最近有很多关于对抗性图像的研究,对抗性图像是经过修改的图像,特别难以被计算机视觉算法准确识别。这类图像可以用来帮助设计更稳健的计算机视觉算法,因为它们的对抗性本质是一种故意设计的最坏情况,如果你的算法可以处理对抗性图像,那么它可能可以处理其他大多数事情。
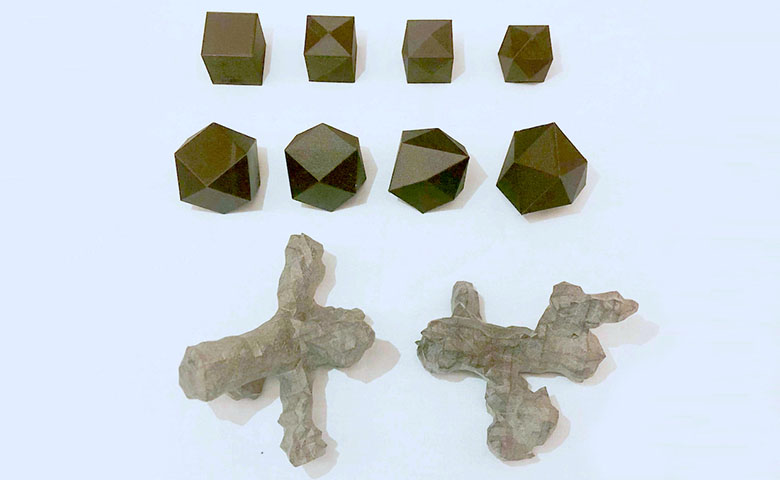
最近有很多关于对抗性图像的研究,对抗性图像是经过修改的图像,特别难以被计算机视觉算法准确识别。这类图像可以用来帮助设计更稳健的计算机视觉算法,因为它们的对抗性本质是一种故意设计的最坏情况,如果你的算法可以处理对抗性图像,那么它可能可以处理其他大多数事情。加州大学伯克利分校的研究人员一直在将这一概念扩展到机器人抓取,物理对抗性物体经过精心设计,对于传统的机器人抓手来说非常棘手。它所需要的只是对简单的三维形状进行轻微调整,而标准的两根手指将很难牢固的抓握。
这些对抗性物体的关键在于它们看起来容易抓握,但至少对于双指(平行颚)抓爪而言并非如此。物体的外观和实际几何形状之间的差异是微妙的:在其中一个例子中,你可以看到六个边中的三个边上有一些浅金字塔的立方体,最小的金字塔只有10度的斜率。每个金字塔对面的一侧是规则的平面,结果是立方体上没有直接相对的面。这会导致双指夹持器出现问题,这种夹持器通过夹住物体来工作,如果试图捏住倾斜的表面,你施加的力将导致物体扭曲,往往导致失败。
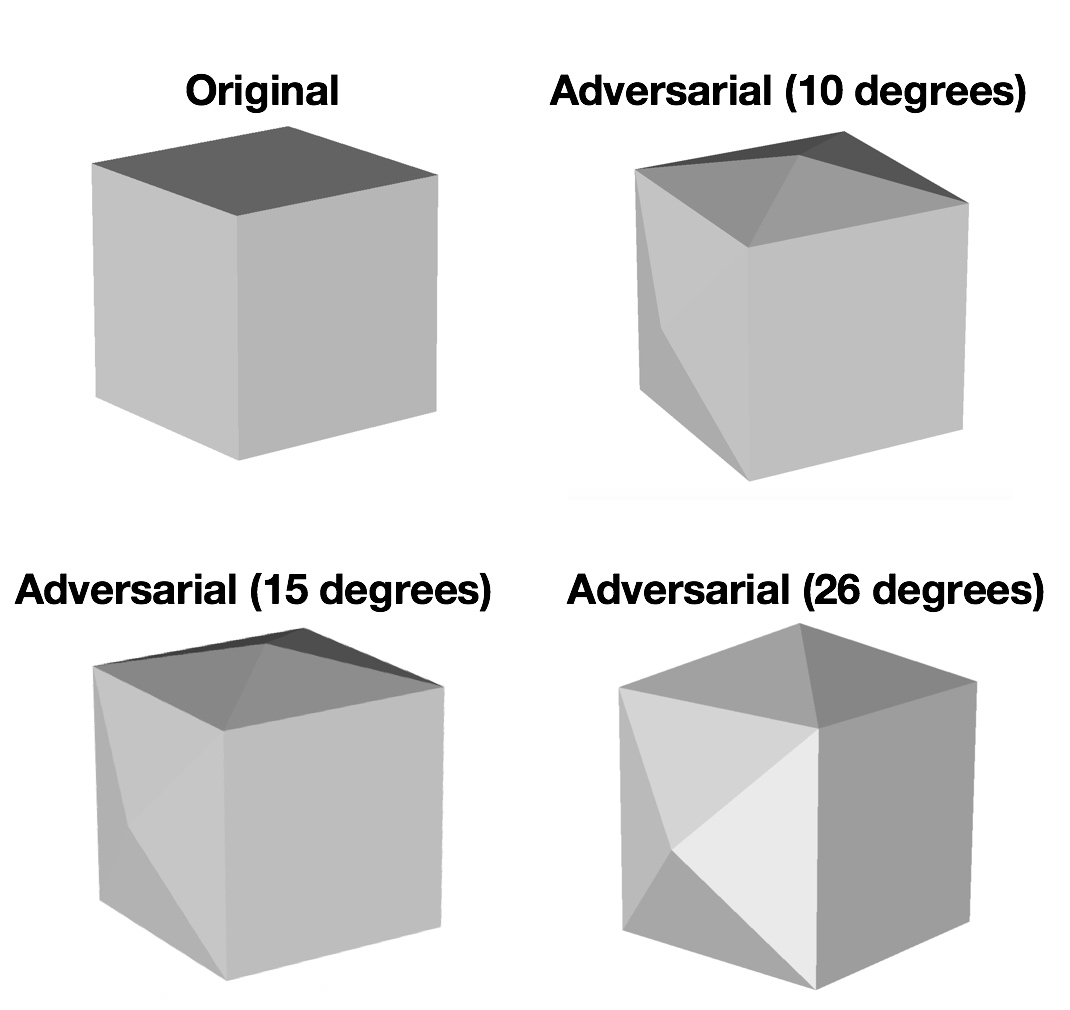 抓握规划经常寻找可捏合的平滑的对抗表面,并且因为对抗立方体和真正的立方体之间的差异足够小,以至于不一定被3D传感器捕捉到,大多数机器人系统会以为这很容易,但是它们可能会失败,立方体扭曲并滑落。
抓握规划经常寻找可捏合的平滑的对抗表面,并且因为对抗立方体和真正的立方体之间的差异足够小,以至于不一定被3D传感器捕捉到,大多数机器人系统会以为这很容易,但是它们可能会失败,立方体扭曲并滑落。随着形状的复杂性增加,开发对抗版本变得更加困难。通过一个立方八面体(一个有八个三角形面和六个正方形面的多边形),研究人员随机扰动了形状的顶点(在模拟中),直到它们最终形成一个没有直接相对表面的顶点。对于更复杂的形状,如交叉圆柱体,使用深度学习算法生成对抗性示例。
在一些初步的实际测试中,带有点接触指的平行钳夹手试图拾取一些这些对抗性物体。在每种情况下,预计计算的掌握(基于模拟中对象的Dex-Net策略)100%成功,但对抗性立方体和立方体的实际成功率仅为13%。
研究人员表示,他们计划用不同的抓手类型以及吸力抓取来测试这些物体,看看他们是否能够找出最具对抗性的对抗性物体。这一切的关键不仅仅在于糟糕的抓取算法,而是开发有助于使机器人掌握足够强大可靠地在现实世界中工作的工具。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消