











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






折纸式机器人抓手可抓住比其自身重120倍的物体
2019年03月15日 由 Aaron 发表
506688
0
 机器人手很难抓住柔韧的物体,因为大部分都是用刚性钳子来完成抓取,而不是为精确抓取而设计的。幸运的是,随着新论文“A Vacuum-driven Origami'Magic-ball'Ward Gripper”的发表,预计更多功能的系统即将出现。麻省理工学院计算机科学与人工智能实验室(CSAIL)和哈佛大学的研究人员描述了一种新颖的抓手,能够提起各种重量,形状和尺寸的物品。
机器人手很难抓住柔韧的物体,因为大部分都是用刚性钳子来完成抓取,而不是为精确抓取而设计的。幸运的是,随着新论文“A Vacuum-driven Origami'Magic-ball'Ward Gripper”的发表,预计更多功能的系统即将出现。麻省理工学院计算机科学与人工智能实验室(CSAIL)和哈佛大学的研究人员描述了一种新颖的抓手,能够提起各种重量,形状和尺寸的物品。该团队计划在国际机器人与自动化大会(ICRA)上展示他们的工作,麻省理工学院教授Daniela Rus表示,“我的一个梦想是创造一个能自动为你打包食品杂货的机器人。先前方法只能处理非常有限的物体类别,如非常轻的物体或符合形状的物体,如盒子和圆柱体,但是使用全新的系统,可以拾起各种各样的任务物品,如葡萄酒瓶到西兰花,葡萄和鸡蛋等。”
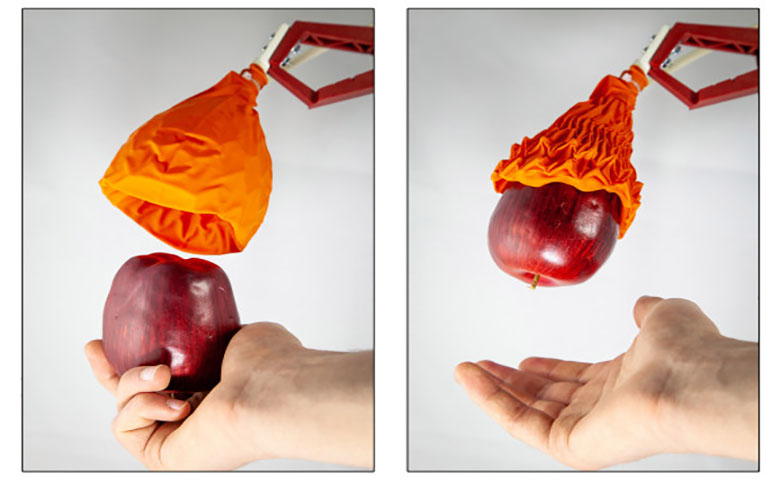
中空锥形夹具由三部分组成,一个3d打印的16块硅橡胶骨架,一个夹具到安装连接器,由一个密封的皮肤包裹,一起折叠在物体上。它的灵感来自于“魔球”,这是一种折纸设计,它是从一张预先折叠的矩形纸折叠而成,具有重复的偏移的图案,可在球形和圆柱形之间进行可逆性变换。
夹具由气动真空提供动力,并由27英寸乳胶橡胶气囊或涂有TPU的尼龙织物片覆盖,具体取决于配置。研究人员测试了三种:一种是自折叠的织物皮肤骨架,另一种是橡胶模制的骨架,第三种是更坚韧的橡胶骨架。
哈佛大学工程学院和威斯生物启发工程研究所教授Robert Wood表示,这种机械手构造方法的一个关键特点是简单。所使用的材料和制造策略允许快速制作新的原型夹具,根据物体或环境进行定制。

在一个实验中,团队将夹具安装在机器人上以测试其强度,它设法抬起并抓住物体,包括12种食品,19种不同的瓶子和杯子,以及14种杂项,一些重量超过4磅,这些物体都是这是它直径的70%,重量是它的120倍,却没有损坏它。目前它最适用于瓶子和罐子等圆柱形物体,这使其成为工厂生产线的天然产品。
Li表示,“像亚马逊这样的公司希望能够挑选出更多精致或不规则形状的物品,但不能用手指和吸盘夹。吸盘不能捡起任何有洞的东西,它们需要的东西要比一个柔软的手指钳强得多。”
工具还有改进的余地。测试的三个骨架中最坚硬的由于其织物皮肤而具有较弱的抓握力,并且在球囊皮肤中出现孔洞。研究人员提出,可以针对特定任务设计定制的骨架。此外,在特定的延伸部分,抓手将物体向外推而不是向内,这是其结构不可避免的缺点。
尽管如此,团队仍然受到初步结果的鼓舞,并且他们将未来的工作留给计算机视觉系统,这将允许抓手看到它正在做什么和使用不同的皮肤材料设计(例如,防滑胶带或粘合剂)。他们还计划尝试不同的接近角度。
加州大学机器人学助理教授Michael Wehner认为,“这是一个非常聪明的设备,利用3D打印,真空和软机器人的力量,以全新方式解决抓取的问题,在接下来的几年里,我可以想象到柔软的机器人灵巧到可以摘下一朵玫瑰,同时也足够强大,可以安全地抬起一名病人。”

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消