











请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






研究团队探索如何让AI学会自己穿衣服
2018年11月06日 由 浅浅 发表
673199
0
 在Siggraph 2018论文“Learning to Dress: Synthesizing Human Dressing Motion via Deep Reinforcement Learning”中,佐治亚理工学院和谷歌脑研究团队描述了他们如何教导AI穿衣服。
在Siggraph 2018论文“Learning to Dress: Synthesizing Human Dressing Motion via Deep Reinforcement Learning”中,佐治亚理工学院和谷歌脑研究团队描述了他们如何教导AI穿衣服。机器学习工具自动发现强大的穿衣技巧,并设法训练具有鲁棒性的穿衣模型,尽管模拟布料的计算费用很高。
这篇论文中提到,让AI穿衣服的秘诀就是触觉,这种触觉用于动态调整AI的协调性,以适应波纹,丝滑的纺织品,该模型体现了布料撕坏的点,并惩罚那些把衣服弄破的AI。
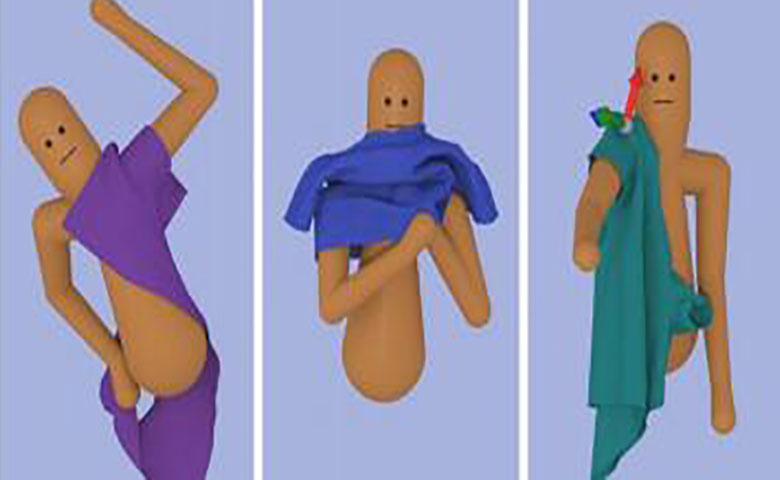
在这项任务中,T恤在角色的肩膀初始化,角色的颈部包含在衣领内。为了使初始服装状态随机化,在模拟开始时对所有服装顶点应用固定幅度的随机脉冲力。在角色开始移动之前,允许服装固定1秒。
[video width="854" height="480" mp4="https://www.atyun.com/uploadfile/2018/11/Learning-To-Dress_-Synthesizing-Human-Dressing-Motion-via-Deep-Reinforcement-Learning.mp4"][/video]
第一个控制策略完成将右末端执行器移动到指定抓握功能范围的任务。该策略尝试匹配服装特征空间中的给定位置和方向目标。一旦达到误差阈值,控制转换到一个对准策略,该策略被设计成将左末端执行器和前臂“折叠”在服装的腰部特征下,以准备为手臂着装。
该策略试图将手臂包含在由握着的手和肩部形成的三角形内。这种启发式近似于服装腰部特征性的开口。此外,该策略因与服装内部的接触而受到奖励,并且根据服装内部的选定点的测地距离进行处罚。
一旦检测到内部接触,并且手臂在启发式三角形内,控制转换到左袖控制器,试图使端部执行器与袖口的端部特征的接触测地距离最小化,并使袖口特征内的手臂的容纳深度最大化。当提供任务向量,其指示末端执行器应该移动的方向以减小其接触测地距离(或者如果不接触,则指向服装特征)。
当肢体通过袖口超过阈值距离,re-grip控制器将双手放在一起,从右手到左手交换握法。一旦左手处于其抓握目标的阈值距离内,就触发抓握交换并且控制转换到第二个策略,其具有与第一个相同的目的和转换标准。然后运行策略以使右臂穿过右袖。此时,第七个也是最后一个策略用于引导角色回到其开始姿势,避免服装破裂。
论文:www.cc.gatech.edu/~aclegg3/projects/learning-dress-synthesizing.pdf

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com








广告


写评论取消
回复取消