












请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






UC Berkeley和CMU研究:双足机器人在离散地形上移动
2018年07月02日 由 浅浅 发表
824513
0

与人类和大多数陆生动物一样,机器人需要在崎岖地形上移动,以便在灾难响应和搜救等应用中发挥作用。然而,设计能够处理离散立足点(如瓦砾或垫脚石)的控制算法是具有挑战性的,因为对脚放置有严格的约束,并且这些系统的运动由复杂的动力学方程控制。
通过利用最佳和非线性控制系统的最新进展,加利福尼亚大学伯克利分校和卡内基梅隆大学的实验室证明了ATRIAS机器人可以在垫脚石上动态行走,而且石头之间的距离和高度是随机变化的。
双足机器人
双足机器人能够穿越离散且不可预测的地形,使其成为空间探索,救灾等应用的理想选择,并且在城市环境中需要机器人在人类设计的离散地形上行走,如楼梯或垫脚石。
虽然多腿机器人多年来在机械设计和控制策略方面已经有了显著的改进,但是它们还远远没有达到在现实世界中部署的能力。目前最先进的机器人在准静态运动时速度慢,对意外干扰表现不够稳健,并且在能量使用方面效率低。
穿越离散地形对于下肢外骨骼也是一个挑战性的问题,目前需要使用者额外的平衡机制,如拐杖,并且不允许无辅助下动态行走。通过设计机器人和反馈算法,可以以安全可靠的方式在复杂的地形上实现精确的足迹放置,我们可以启用新的机器人应用,并将这些想法转化为增强人类生物机电设备。

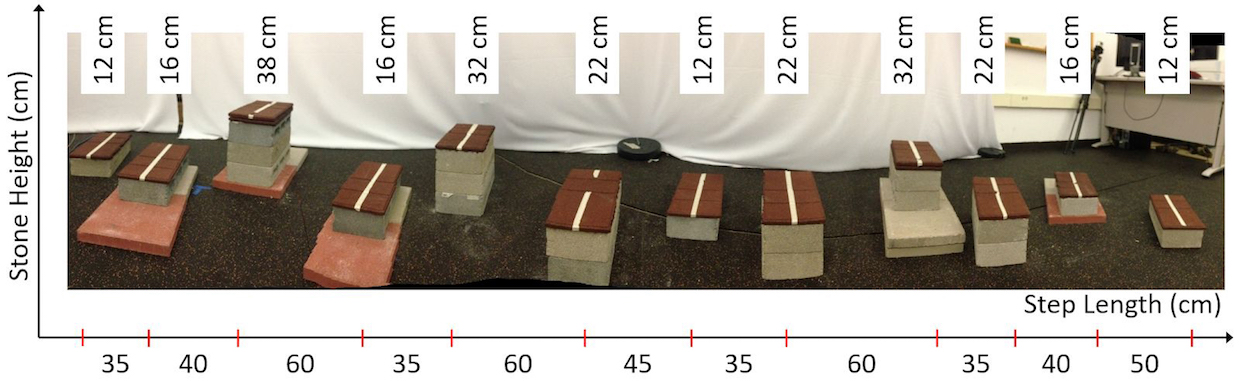
双足机器人行走在随机离散的地形上,有不同的步长和步高。
在垫脚石上动态行走
加州大学伯克利分校的混合机器人小组一直致力于开发高度自由度双足机器人的正式控制框架,不仅可以确保在离散地形上精确脚步位置,而且对模型不确定性和外部力量建模。这些方法独立于特定的机器人本身,并且已经在各种机器人模型(包括RABBIT,ATRIAS和DURUS)上进行了(模拟)测试。
而且,这些机器人不会提前知道地形会是什么样子,只有下一步的位置会显示给机器人,这是机器人在真实世界中可能遇到的情况。我们还在ATRIAS双足机器人平台上对控制算法进行了实验测试,并且能够在随机变化的离散地形上实现动态步行,步长在30到65厘米之间变化,步高需要向上/向下22厘米,同时保持平均步行速度为0.6米/秒。
我们相信这是第一次在双足机器人上成功演示了步进长度和阶梯高度同步变化的动态行走。
为什么离散行走是机器人技术中的难题?首先,双足机器人是高度自由度的系统,其运动由复杂的非线性微分方程控制,捕捉地面相互作用的混合动力学:机器人必须通过不断地与周围环境接触来与环境相互作用。
此外,我们所使用的机器人,如ATRIAS,是欠驱动的,这意味着脚踝上没有执行器,只有定点脚。想象一下踩高跷或攀登一段台阶,保持平衡的唯一方法就是继续走下去。垫脚石的问题也对脚放置有严格的限制,当然在现实世界中,这些垫脚石也可能被推翻。此外,机器人必须在其他物理约束条件下工作,例如电机扭矩限制和摩擦(机器人不得滑动)。所有这些约束可能相互作用,使控制设计过程变得很重要。
踏脚石问题已经得到广泛研究,在Valkyrie和ATLAS等机器人上取得了令人印象深刻的成果。但是我们的方法的不同之处在于它们允许动态行走,而不是机器人倾向于使用的较慢的准静态运动。通过推理系统动力学的非线性以及利用最优和非线性控制技术的最新进展,我们可以以简单紧凑的形式指定控制目标和期望的机器人行为,同时提供正式的稳定性和安全性保证。这意味着我们的机器人可以走过不连续的地形而不会滑倒或倒下。
[video width="1280" height="720" mp4="https://www.atyun.com/uploadfile/2018/07/Dynamic-Bipedal-Locomotion-over-Stochastic-Discrete-Terrain.mp4"][/video]
下一步
我们的机器人目前是“盲目的”,我们需要向他们提供有关其周围环境的信息,例如下一个垫脚石的位置。我们正在致力于将计算机视觉算法(包括深度分割和深度学习)与我们的控制器集成。这将允许机器人推断其周围环境并导致完全自动系统的发展。随着新机器人Cassie即将抵达伯克利,我们计划将实验扩展到在现实世界的垫脚石上进行3D行走。
从长远来看,这项研究将有助于使双足机器人能够在粗糙地形,如室内环境(楼梯和狭窄走廊)以及户外环境(如树木繁茂的小径)中自动行走。我们研究的关键部分包括安全性,耐用性和敏捷性,即我们希望我们的机器人能够在“正确”的位置进入,以防止它们摔倒,同时加强对于意外和干扰的鲁棒性。
这种技术的潜在应用很多:在搜索和救援中,可以部署自动人形机器人而不是人类救援人员; 探索尚未开发的地区,例如其他行星表面可能相当不平坦的地方,或作为家中的机器人。此外,我们为双足机器人开发的方法也可以转化为增强人体的自动化设备,例如下肢外骨骼。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com

广告







广告
写评论取消
回复取消