












请先登录您的atyun账户,方可使用该功能

审核通过后即可使用此功能,请耐心等待~






研究团队用神经网络训练机器人在动态环境中找到并抓取物体
2018年06月26日 由 浅浅 发表
579780
0
机器人可能会制造汽车和翻转汉堡,但是它们是否可以在凌乱的办公桌或卧室地板上找到并车钥匙,并把它递给你?昆士兰科技大学(QUT)的机器人研究人员现在已经使用神经网络来帮助机器人更快更准确地抓住物体,即使在混乱和变化的环境中也是如此。
QUT的Jurgen Leitner博士说,抓住和拾取物体对于人类来说是一项基本任务,它是机器人与之斗争的一个目标,尤其是在结构化设置之外或移动物体时。
Leitner说:“世界是不可预测的,事情一直在变化和移动,并混合起来,往往没有任何提示,所以机器人需要能够适应和工作在非结构化的环境。”
他指出,虽然机器人目前已适应“完全计划和有序”的设置,如工厂,但这项研究可能意味着扩大其在较少结构化环境中的使用或需要更大的自主权。
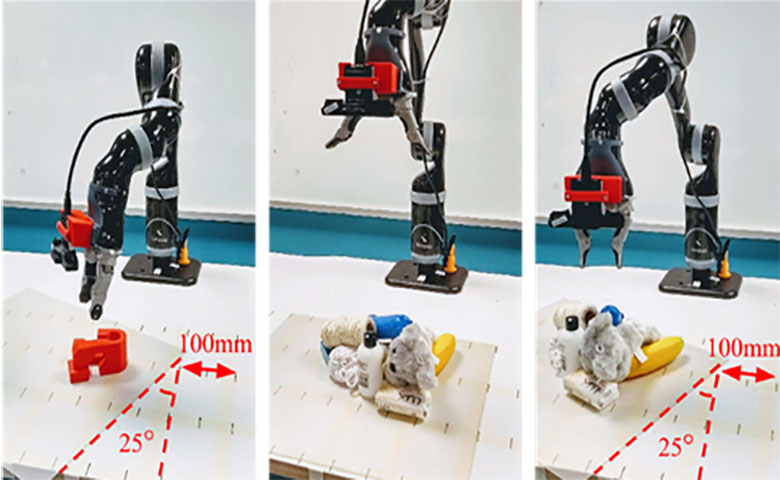
博士研究员Douglas Morrison和其他QUT研究人员开发的这种新方法使用卷积神经网络处理图像,并使用双指机制对各种抓握姿势进行建模。
Leitner说,神经网络能够一次扫描机器人前方的深度,并能够在20毫秒左右的时间内做出最佳把握的决定,即使在杂乱的空间中也能实现“更大的目标”。
神经网络能够跟踪移动的物体,并且即使物体或周围的杂波随机移动,也可以重新调整机器人的抓握姿势。
机器人的成功率为83%,其任务是抓住以前看不见的具有复杂几何形状的物体,这些物体在抓握尝试期间被移动。
与此同时,常见的家庭用品更容易掌握,精确度达到88%,移动或“动态”杂波的成功率为81%。
Leitner表示,机器人更大的灵活性可能意味着工厂将不需要在未来如此僵硬地布局。
“随着更多的智能机器人开发出来,不仅可以拖地,而且还可以拾取物品并将它们收起来,”他补充说。
该研究得到了澳大利亚机器人视觉中心的支持,该中心上周推出了一项全国路线图,以指导全国范围内更多地采用机器人技术。

欢迎关注ATYUN官方公众号
商务合作及内容投稿请联系邮箱:bd@atyun.com

广告







广告
写评论取消
回复取消